
基于仿生眼的主动式视觉SLAM系统
Robust Active Visual SLAM System Based on Bionic Eyes
基于仿生眼的主动式视觉SLAM系统
首次使用仿生双眼作为视觉传感器,提出了一种主动式的视觉SLAM系统,该系统受人眼中心视和周边视的启发,使用中心视的广角相机去探索环境中的特征丰富区域,使用saccade眼球运动快速切换到特征丰富的区域进行SLAM的位姿计算,实现了图形特征丰富区域的自主寻找和注视,使得本系统具有环境特征主动探索能力,与固定双目相比,在遇到弱纹理区域将主动的进行视野的切换,保证了特征的数量,不容易发生特征丢失现象,从而保障轨迹完整地输出,大幅提升了SLAM系统的复杂场景适用能力。
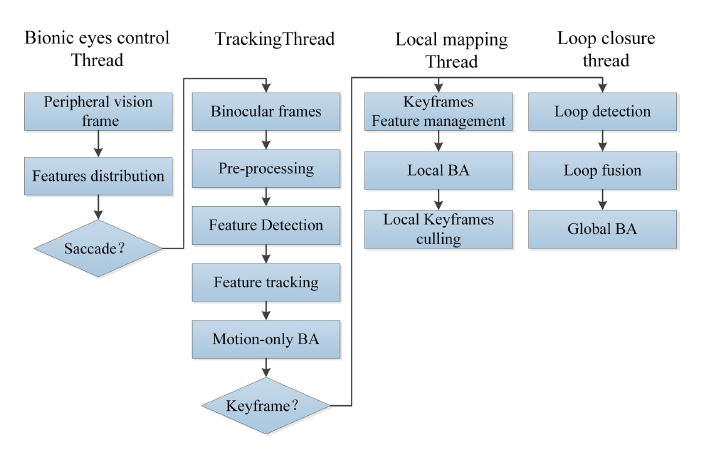
图1 算法流程图
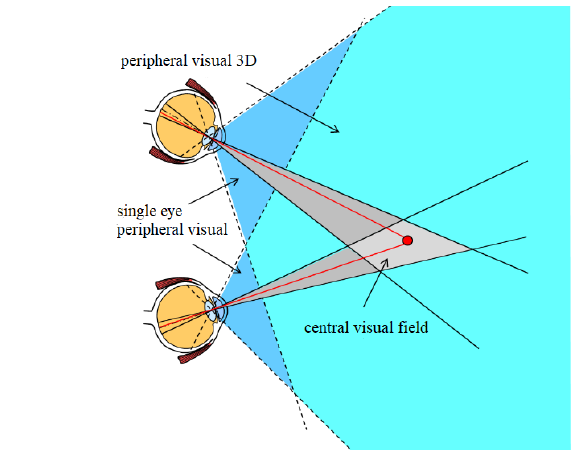
图2 人类视觉的周边视以及中心视说明
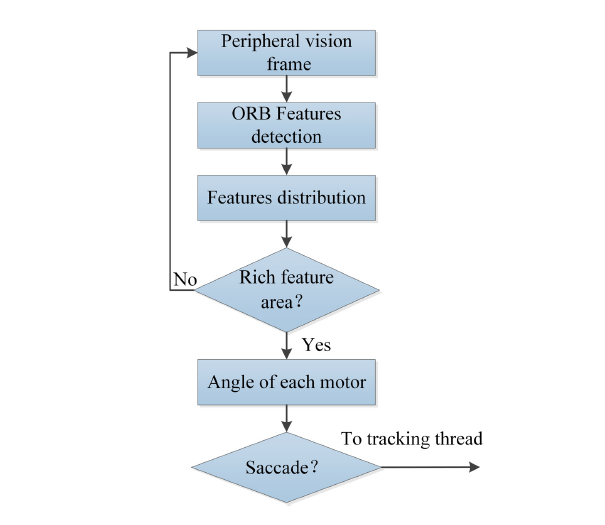
图3 仿生眼移动策略算法流程
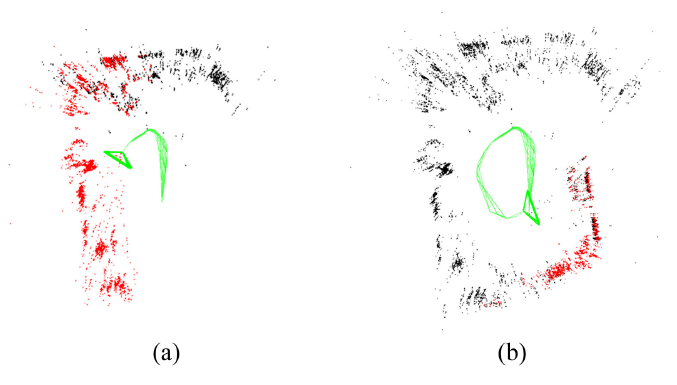
图2 轨迹对比。(a)由固定立体相机SLAM计算得到的轨迹,(b)由主动仿生眼SLAM计算得到的轨迹
本文链接: