
三维地图实时更新中的动态障碍物剔除
Dynamic Obstacles Rejection for 3D Map Simultaneous Updating
三维地图实时更新中的动态障碍物剔除
本文针对机器人视觉导航以及三维重建等应用中的点云地图更新,提出了一种简单有效的消除动态目标“运动伪迹”的方法。我们基于视锥体滤波器提取帧间视角重叠区域,通过使用KD-tree对视角重叠区域进行双向搜索以获得动态目标“运动伪迹”。该方法同时适用于静态和动态环境,并且可以轻易植入大部分SLAM系统和三维重建系统中。在KITTI Odometry Dataset和实验室真实场景中进行试验,结果表明,该方法对于点云地图更新中的动态目标“运动伪迹”剔除具有良好的效果。

图1. 图中红色箭头流程表示,动态场景下传统的点云地图更新方法会使点云地图中遗留动态目标的“运动伪迹”。绿色箭头流程表示,本文基于视锥剔除滤波和光线追踪原理提出的点云地图更新方法,该方法可以实时剔除动态目标“运动伪迹”,同时更新点云地图。

图2. 实验室真实动态场景的三维重建结果: (a)是本文参考文献[15]得到的重建结果,黄线标出部分是其点云地图中存在的大量“运动伪迹”。(b)是将本文方法加入到参考文献[15]的系统后得到的结果,本文方法完全消除了黄线标记中的“运动伪迹”。
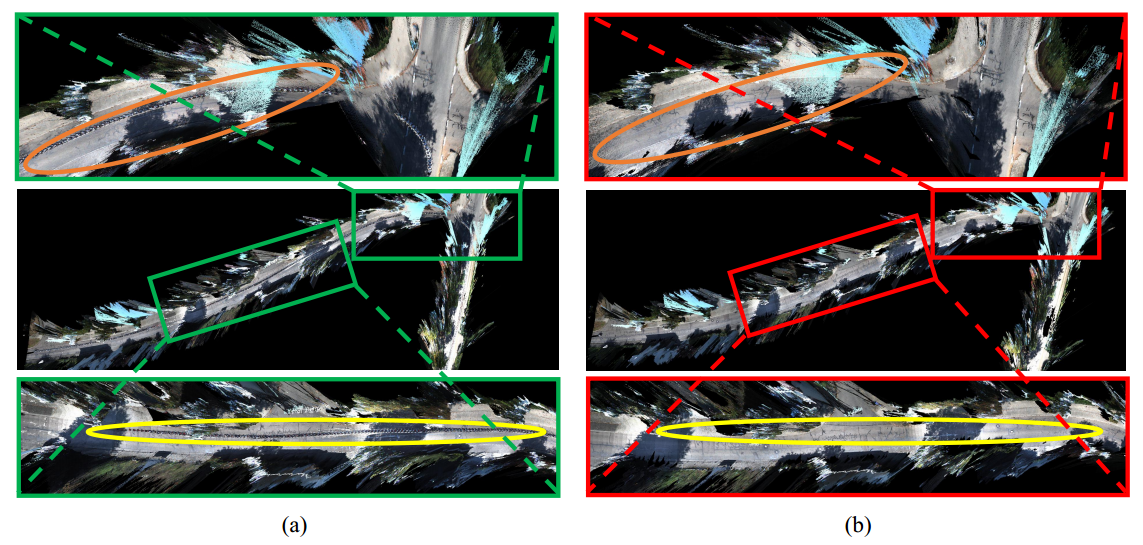
图3. 大量运动物体存在的KITTI视觉里程计数据集的场景三维重建结果。图(a)显示了论文中参考文献[16]的结果,放大区域显示了来自运动物体的“运动伪迹”效应。(b)是本文方法的结果,准确地剔除了所有的动态目标“运动伪迹”,很明显本文的方法效果更好。
本文链接:
https://ieeexplore.ieee.org/document/8358699/